9. Odin1 重定位功能
9.1 说明
Odin1目前支持三种使用模式:ODOM里程计模式、SLAM模式和Relocalization重定位模式。模式切换均通过修改/catkin_ws/src/odin_ros_driver/config/control_command.yaml文件中“custom_map_mode”参数进行配置
9.2 使用教程
-
step1: 设置“custom_map_mode=1”启用SLAM模式,开始录制地图,该模式下在录制结束时会进行回环检测。
-
step2: 当地图采集完成后请勿直接“Ctrl+c”退出驱动,需要另起终端进入/catkin_ws/src/odin_ros_driver路径下运行“./set_param.sh save_map 1”等待驱动运行终端提示地图保存完成后方可停止。此时会在用户指定目录下生成地图bin格式文件,如果用户未设置,则默认会以结束时间戳命名保存在map文件夹中。注:保存地图需要保证
lsusb -v -d 2207:0019 | grep -i bcdusb看到的结果为3.2。 -
step3: 在control_command.yaml文件中修改“custom_map_mode=2”并设置地图保存路径(精确到文件后缀)。如:/home/hugo/git/odin_0.8.0/map/office.bin
-
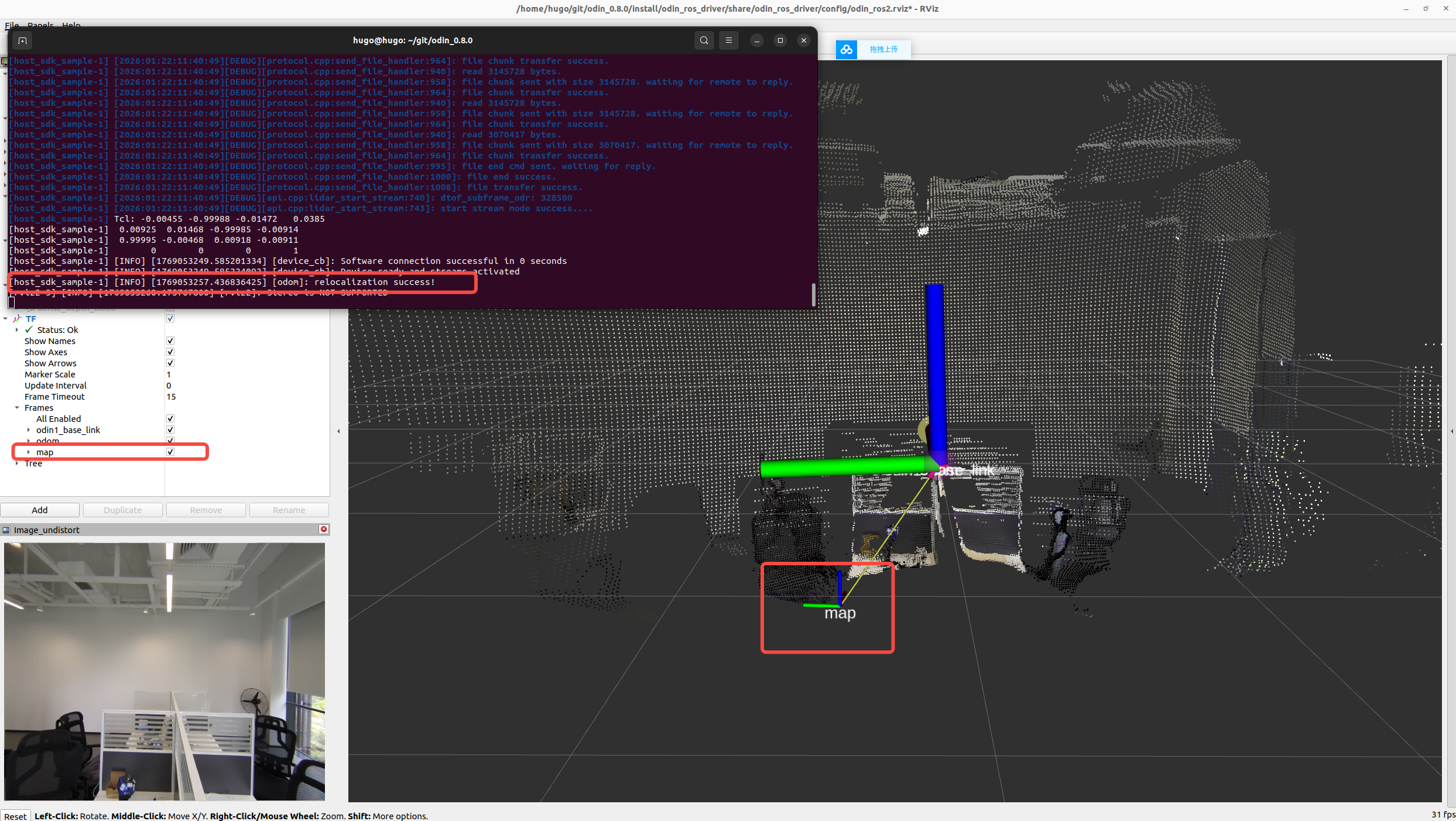
step4: 重新运行驱动,重定位成功可以看到终端提示“[INFO] [1769564323.183375282] [odom]: relocalization success!”,且/tf中出现/map坐标系。