7. Odin1 快速启动
7.1 硬件设备安装
硬件组成:Odin主机、数据线、电源线(电源适配器需用户自行准备) PC端:需要安装ubuntu20.04 ROS1/ROS2或ubuntu22.04 ROS2环境
7.2 设备连接PC
lsusb
# 2207:0019即为Odin USB设备号
Bus 002 Device 014: ID 2207:0019 Fuzhou Rockchip Electronics Company hawk
7.3 获取驱动
git clone https://github.com/manifoldsdk/odin_ros_driver.git
7.4 创建 udev rules
sudo gedit /etc/udev/rules.d/99-odin-usb.rules
# 将下述内容粘贴到99-odin-usb.rules文件中,保存
SUBSYSTEM=="usb", ATTR{idVendor}=="2207", ATTR{idProduct}=="0019", MODE="0666", GROUP="plugdev"
# 重新加载并导入设备
sudo udevadm control --reload
sudo udevadm trigger
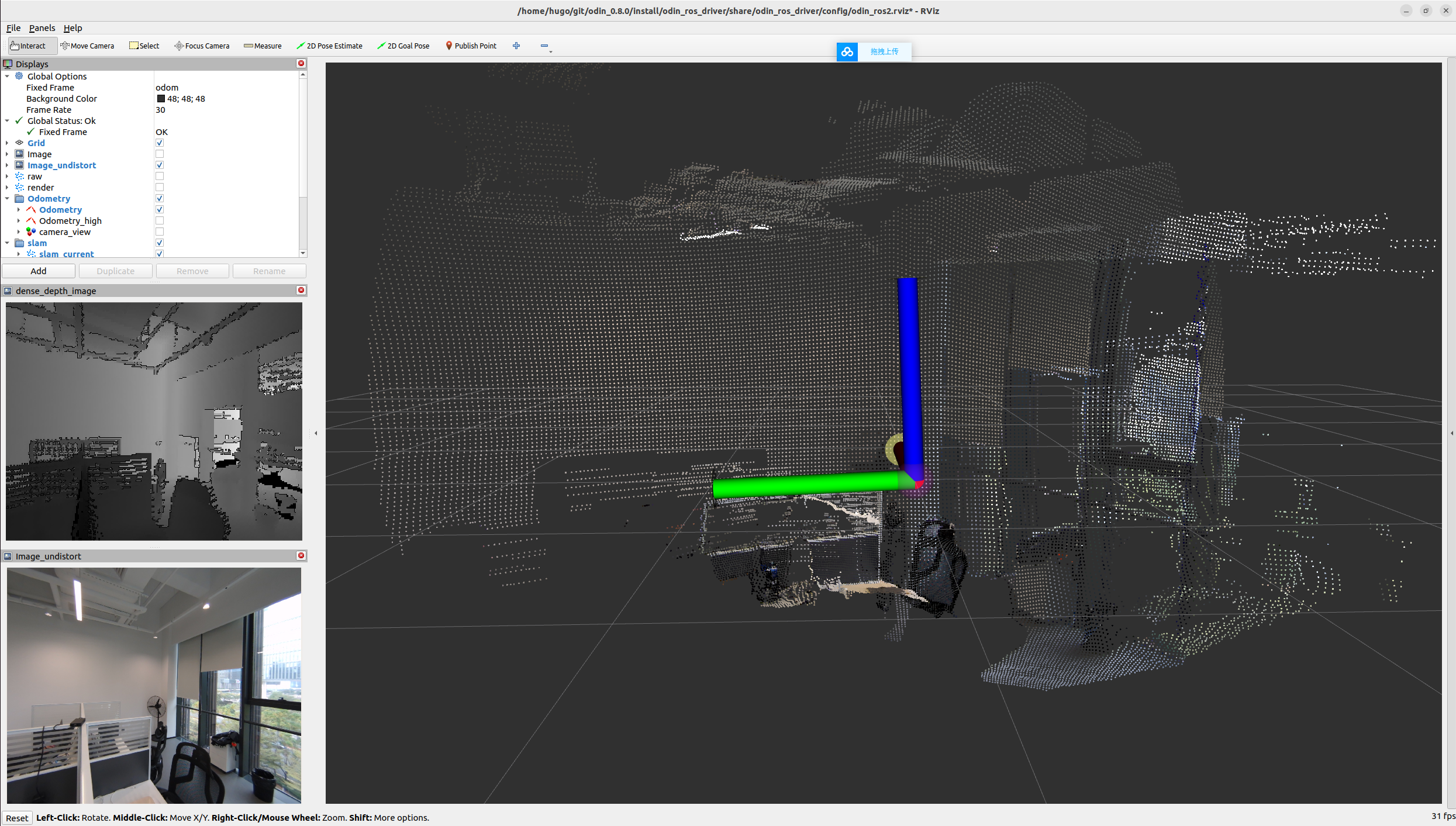
7.5 运行驱动
📌 运行驱动之前请确保设备已正常通电并接入电脑
mkdir -p catkin_ws/src # 手动将odin_ros_driver放到src文件夹中,$PATH为用户自己使用路径 cp -r $PATH/odin_ros_driver $PATH/catkin_ws/src # 驱动提供了编译脚本,路径为:catkin_ws/src/odin_ros_driver/script/ ./build_ros2.sh # ros1则运行build_ros.sh cd $PATH/catkin_ws source install/setup.bash ros2 launch odin_ros_driver odin1_ros2.launch.py