6. 建图与重定位建议调用流程
6.1 文档说明
本文档介绍典型场景下建议的建图 & 重定位功能调用流程。
6.2 概念说明
- 设备:Odin1 设备
- 主机:连接 Odin1 并运行上位机调用 API 的设备
- 设备运行模式:Odin1 提供【算法】和【传感器】两种主要运行模式
- 传感器运行模式:设备仅上传所有传感器原始数据
- 算法运行模式:Odin1 设备内部算法的运行模式,分别是里程计模式、SLAM 模式、和重定位模式
- 地图文件:Odin1 内部算法在 SLAM 模式下生成的特殊格式地图文件
6.3 整体流程
建议将设备初始化开流后保持与设备连接,通过特定 API 对设备工作模式(raw / slam)、算法工作模式(odom / 建图 / 重定位)、以及特定数据流的开关进行控制,确保设备响应速度,避免与设备反复重连及设备内部反复重新初始化。
6.4 具体流程
6.4.1 设备连接 & 初始化
// 初始化 sdk,准备与设备连接
lidar_system_init(lidar_device_callback_t cb);
// lidar_device_callback 内处理设备连接:
lidar_create_device(lidar_device_info_t *dev_info, device_handle *device);
// 获取设备版本
lidar_get_version(device_handle device);
// 获取标定文件
lidar_get_calib_file(device_handle device, const char* path);
// 注册数据回调
lidar_register_stream_callback(odinDevice, data_callback_info);
// 初始化设备
lidar_open_device(device_handle device);
6.4.2 (可选)设备连接 & 初始化状态下,开启加密设备日志保存
// 在收到设备回调(device_cb)后、调用 lidar_open_device 之前调用
// 设备运行期间产生的加密日志会持续写入 dest_dir 指定的目录
// dest_dir 必须是已存在的目录,建议每次连接使用独立子目录便于归档
const char* dest_dir = "/home/user/odin_logs/Conn_20260610_101530";
int ret = lidar_enable_encrypted_device_log(odinDevice, dest_dir);
// 返回 0 表示开启成功,-1 表示失败
// 不需要"关闭日志"接口;不调用本 API 即不启用日志
// 排障时将 dest_dir 整目录打包发回厂商支持即可
说明:
- 该接口必须在
lidar_open_device之前调用,否则会丢失启动期日志; dest_dir不会被 SDK 自动创建,需要客户自行mkdir -p(或std::filesystem::create_directories);- 与 6.4.4 保存地图不同,本接口无需轮询,也无需再用单独的 API 把日志从设备拉到主机——日志会由 SDK 在主机端持续写入
dest_dir; - 对应到 ROS 驱动里
control_command.yaml的save_log: 1,纯 SDK 客户不需要这个 yaml,直接调用本 API 即可。
参考实现见 host_sdk_sample.cpp(device_cb 内 g_save_log 分支),头文件声明见 lidar_api.h。
6.4.3 建图:设备连接 & 初始化状态下,开始建图
// 使能内部算法
int type = LIDAR_MODE_SLAM;
lidar_set_mode(odinDevice, type);
// 配置算法运行模式至 SLAM 模式: 将 "map_mode" 参数设置为 1
// "map_mode" 设置不同的值对应分别为
// 0: 正常里程计模式
// 1: 建图 SLAM 模式
// 2: 重定位模式
lidar_set_custom_parameter(device_handle device, const char* param_name, const void* value_data, size_t value_length);
// 将保存地图标志位 "save_map" 参数初始化为 0
lidar_set_custom_parameter(device_handle device, const char* param_name, const void* value_data, size_t value_length);
// 设备开流,算法开始运行,可以开始移动设备正常建图
lidar_start_stream(device_handle device, int type, uint32_t &dtof_subframe_odr);
6.4.4 建图:设备连接 & 初始化 & 建图状态下,保存 & 获取地图
// 设备内部保存当前建图文件:将 "save_map" 参数设置为 1
lidar_set_custom_parameter(device_handle device, const char* param_name, const void* value_data, size_t value_length);
// 查询建图文件是否保存完成:读取到 "save_map" 参数由 1 变 0
int value = 0;
int result = lidar_get_custom_parameter(odinDevice, "save_map", &value);
// 当设备内部地图保存完成后,获取设备中的地图文件至主机
lidar_get_mapping_result(device_handle device, const char* dest_dir, const char* file_name);
// 保存地图并不会停止建图,可选择继续运行并再次保存 & 获取地图
6.4.5 建图:设备连接 & 初始化 & 建图状态下,取消建图
// 将设备切换到传感器模式,保留原始传感器输出,关闭内部算法
int type = LIDAR_MODE_RAW;
lidar_set_mode(odinDevice, type);
// 如需完全停止内部算法和数据输出,调用以下 api
// lidar_stop_stream(device_handle device, int type);
// 重新执行 6.4.3 即可重新开始建图
6.4.6 重定位说明
该模式要求 Odin1 在 SLAM 模式生成并上传的地图文件,用于传入设备运行重定位。
6.4.7 重定位:设备连接 & 初始化状态下,开始重定位
// 配置算法运行模式至重定位模式: 将 "map_mode" 参数设置为 2
// "map_mode" 设置不同的值对应分别为
// 0: 里程计模式
// 1: SLAM 模式
// 2: 重定位模式
lidar_set_custom_parameter(device_handle device, const char* param_name, const void* value_data, size_t value_length);
// 指定和传入重定位使用的地图文件,不传入则无法正常运行
lidar_set_relocalization_map(device_handle device, const char* abs_path);
// 设备开流,算法开始运行
lidar_start_stream(device_handle device, int type, uint32_t &dtof_subframe_odr);
6.4.8 重定位:设备连接 & 初始化 & 建图状态下,停止重定位
// 将设备切换到传感器模式,保留原始传感器输出,关闭内部算法
int type = LIDAR_MODE_RAW;
lidar_set_mode(odinDevice, type);
// 如需完全停止内部算法和数据输出,调用以下 api
// lidar_stop_stream(device_handle device, int type);
// 重新执行 6.4.7 即可重新开始重定位
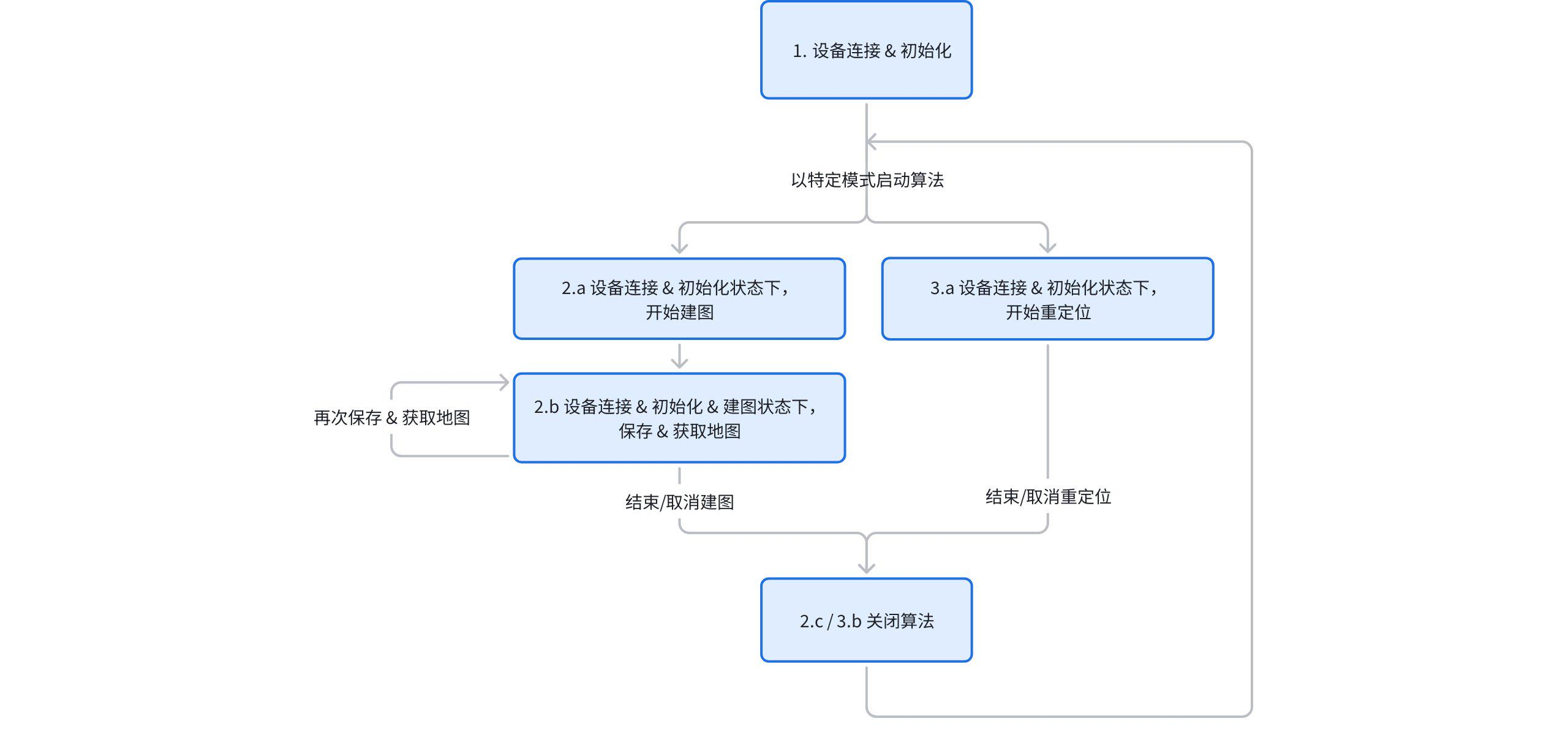
6.5 流程图总结
6.6 注意事项
目前不支持动态切换设备运行模式和算法运行模式,如需切换请先停止算法,完成相关配置后重新启动算法。