11. Odin1 重定位地图获取手册
📄 Download English PDF: Odin1 Relocalization Map Acquisition Guide
11.1 说明
Odin1提供重定位功能,已实现与MANIFOLD手持扫描仪的数据联动。目前我们提供3个方案:
- 1.使用Odin采集olx数据,通过Mindcloud处理后使用“导出地图”功能导出bin文件用于Odin的重定位;
- 2.使用留形手持扫描仪(留形机,如:Q9000)采集lx数据,通过Mindcloud处理后使用“导出地图”功能导出bin文件用于Odin的重定位;
- 3.使用Odin SLAM模式生成bin文件用于Odin的重定位。
11.2 使用教程
11.2.1 方案1:使用Odin采集olx数据,导出地图
Odin录制olx文件(Odin固件版本要求0.10.0以上,驱动版本0.9.0以上)
- 使用ubuntu系统,驱动设置recorddata: 1
- 使用windows系统,运行OdinViewer,录制数据
- 使用Mindcloud处理olx文件,在后处理中点击“导出地图”按钮,获取重定位bin文件
11.2.2 方案2:使用留形手持扫描仪采集lx数据(如您手上无留形手持扫描仪,请选择其他方案),导出地图
留形手持扫描仪录制lx文件
- Q9000连接手机,使用Mindcloud Go进行数据扫描
- 扫描结束后将工程文件导出到本地
- 使用Mindcloud处理lx文件,在后处理中点击“导出地图”按钮,获取重定位bin文件
11.2.3 方案3:使用Odin SLAM模式生成bin文件
Odin录制slam数据
- 使用ubuntu系统,驱动设置recorddata: 0,同时将map mode设置为1
- 录制解释后请勿C掉驱动进程,另起终端进入/catkin_ws/src/odin_ros_driver路径下运行“./set_param.sh save_map 1”等待驱动运行终端提示地图保存完成并在对应文件夹中生成bin文件后方可停止
- 设置map mode: 2进入重定位模式
- 重新运行驱动开始重定位
11.3 重定位地图显示
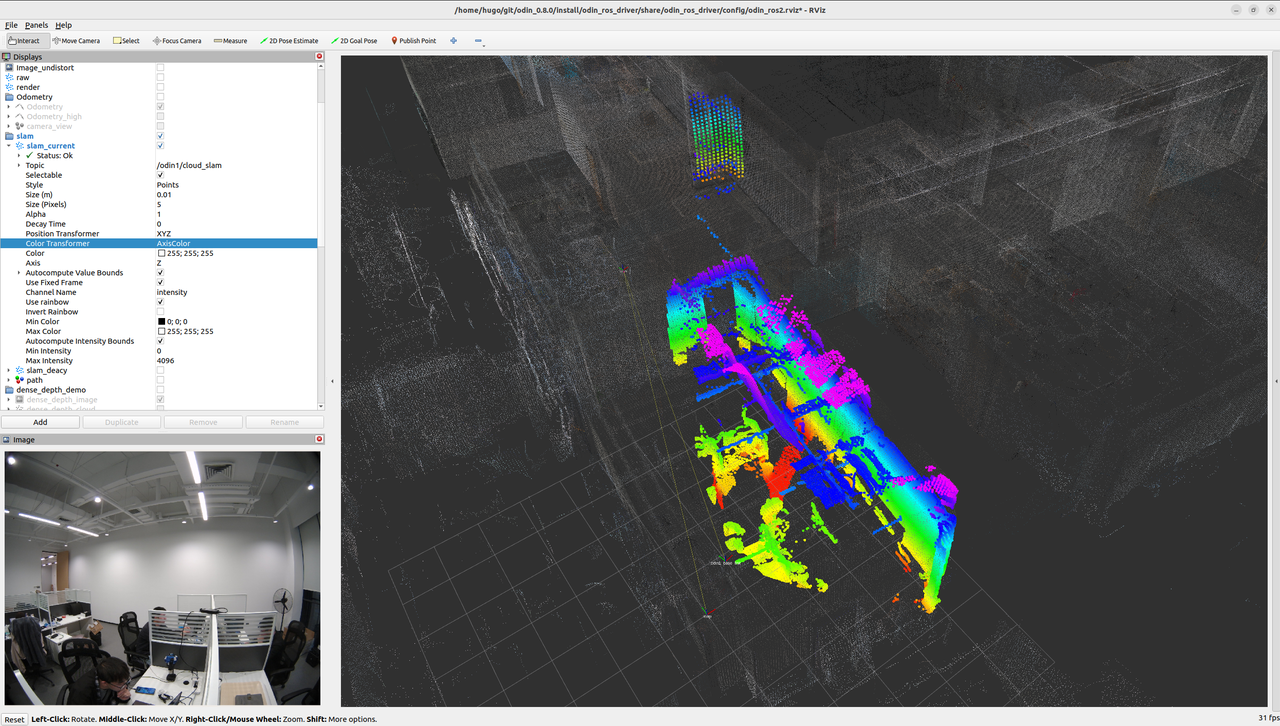
olx文件导入Mindcloud后,除了可以导出重定位的地图,也可以直接点击左上角的保存,保存pcd格式的点云地图。此地图可用于rviz的显示,需要对其进行发布,可以对pcd进行抽稀后自定义发布节点发布到ros中,可参阅如下python代码:
最终结果显示如下: