11. Odin1 Relocalization Map Acquisition Guide
📄 Download English PDF: Odin1 Relocalization Map Acquisition Guide
11.1 Overview
Odin1 supports relocalization and is integrated with the MANIFOLD handheld scanner data pipeline. Three workflows are currently provided:
- Option 1: Capture
olxdata with Odin, process it with Mindcloud, and use the Export Map function to export abinfile for Odin relocalization. - Option 2: Capture
lxdata with the MANIFOLD handheld scanner (e.g. Q9000), process it with Mindcloud, and use the Export Map function to export abinfile for Odin relocalization. - Option 3: Generate a
binfile directly with Odin in SLAM mode for Odin relocalization.
11.2 How to Use
11.2.1 Option 1: Capture olx data with Odin and export the map
Record olx files with Odin (requires Odin firmware ≥ 0.10.0 and driver ≥ 0.9.0):
- On Ubuntu, set
recorddata: 1in the driver to record data. - On Windows, run OdinViewer to record data.
- Process the
olxfile with Mindcloud, then click Export Map in post-processing to obtain the relocalizationbinfile.
11.2.2 Option 2: Capture lx data with the MANIFOLD handheld scanner and export the map
(Skip this option if you do not have a MANIFOLD handheld scanner.)
Record lx files with the handheld scanner:
- Connect the Q9000 to your phone and use Mindcloud Go to scan.
- After scanning, export the project file to your local machine.
- Process the
lxfile with Mindcloud, then click Export Map in post-processing to obtain the relocalizationbinfile.
11.2.3 Option 3: Generate a bin file with Odin SLAM mode
Record SLAM data with Odin:
- On Ubuntu, set
recorddata: 0in the driver and setmap modeto 1. - After recording, do not kill the driver process. Instead, open another terminal, go to
/catkin_ws/src/odin_ros_driver, and run./set_param.sh save_map 1. Wait until the driver terminal indicates that the map has been saved and abinfile has appeared in the corresponding folder before stopping. - Set
map mode: 2to switch to relocalization mode. - Re-run the driver to start relocalization.
11.3 Visualizing the Relocalization Map
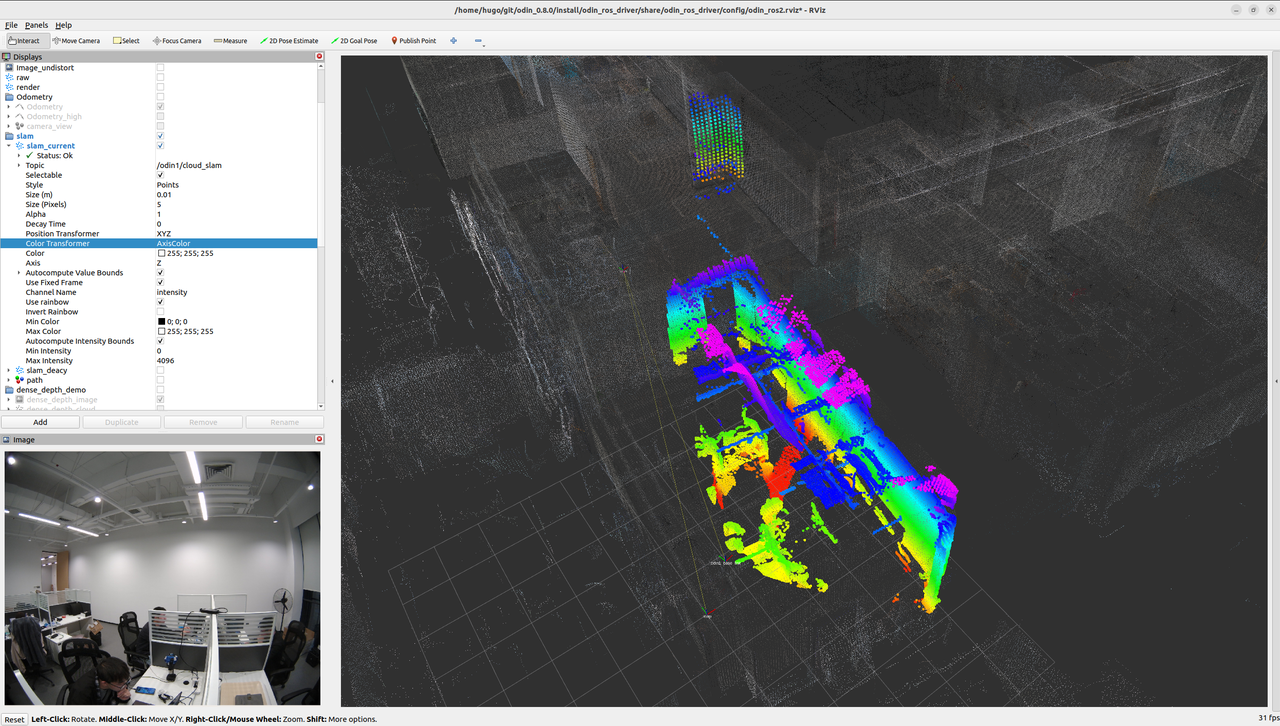
Once the olx file is imported into Mindcloud, you can not only export the relocalization map but also click Save in the upper-left corner to save a point-cloud map in pcd format. This map can be displayed in RViz; you need to publish it as a ROS topic. You can downsample the pcd and write a custom publisher node — see the following Python sample:
The final result looks like this: